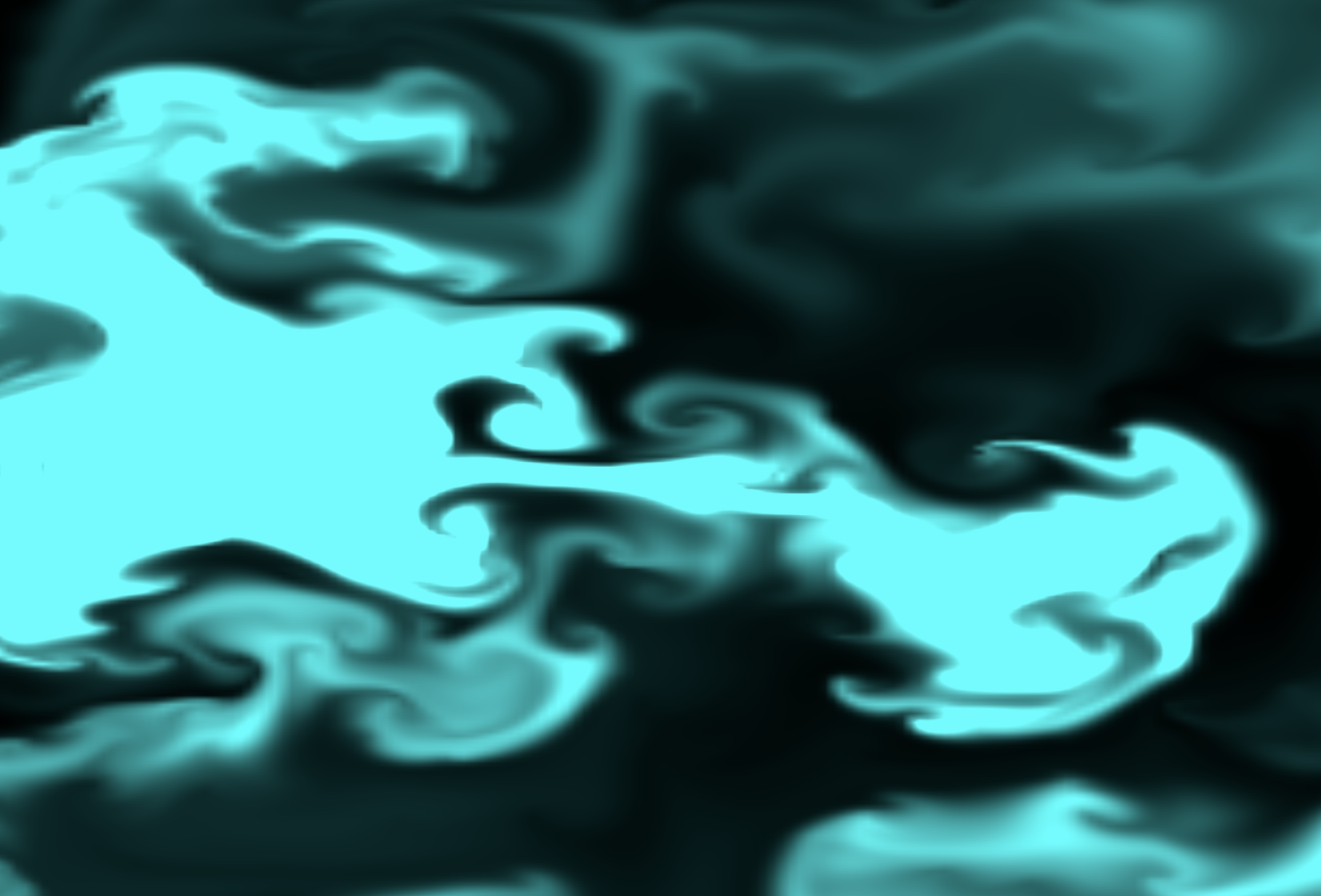
WebAssembly Fluid Simulation
A high-performance, real-time fluid simulation running directly in the browser, powered by C++ and WebAssembly.
- Compiled a C++ fluid dynamics engine to WebAssembly (WASM) for near-native browser performance
- Leveraged Web Workers and SharedArrayBuffer for off-main-thread, multithreaded computation
- Built a responsive frontend using React and Vite, utilizing custom security headers for cross-origin isolation